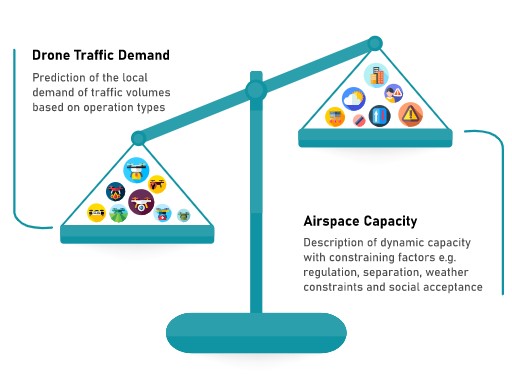

As drone operations become more common over populated areas, managing the number and type of unmanned aerial vehicles (UAV) becomes increasingly important. Influential factors including noise effects, visual impact, collision risk, separation processes, drone flight planning and U-space services all play a part in efficiently balancing demand and supply.
DACUS developed a demand and capacity balancing (DCB) decision-making process and designed a DCB concept of operations (ConOps) for U-space that takes account of key limiting factors for drone operations over the population. The project developed prototypes of the proposed solutions: A collision risk prototype quantified the air and ground risks as a limiting factor to determine the maximum number of drones in an urban area; a social impact prototype measured the visual and noise effects over the population as another limiting factor; and a route planning prototype took into account the uncertainty of demand as part of the process. Because drone mission trajectories tend to be more dynamic than manned aviation, the system needs to deal with diverse and multiple changes that affect flight plans that can be received at short notice.
DACUS tested the prototypes in several simulations at different stages of the drone operations lifecycle (strategic, pre-tactical and tactical phases), and in representative European cities: Toulouse, Frankfurt, Madrid, and Toledo. The project demonstrated that it is possible to monitor the demand and capacity imbalances based on safety and social criteria, and then to implement DCB measures in U-space airspace in response.
DACUS helps to facilitate the social acceptance of future drone operations in urban environments. The solution is capable of monitoring both noise and visual impact over the population, while ensuring that risk levels do not increase.
DOWNLOAD
White paper on Rule-based separation for dynamic airspace management
Benefits
- Mitigates impact noise and visual annoyance
- Prioritises free-route operations whenever possible
- Effective decision-making based on stable predictions